
|
北京哪里回收陀飞轮手表,陀飞轮还有个亲戚叫卡罗素,相信大家看过我的上篇(【万奢网】简单大白话,告诉你机械手表到底如何工作?)文章,应该对手表的核心部件擒纵调速器有了大概的了解了吧。 在此重复下手表的工作原理基本内容:机械手表是利用发条作为动力,经过一组齿轮组成的传动系来推动擒纵调速器工作,再由擒纵调速器反过来控制传动系的转速,传动系的转速受控于擒纵调速器所以指针能按一定的规律在表盘上指示时刻。
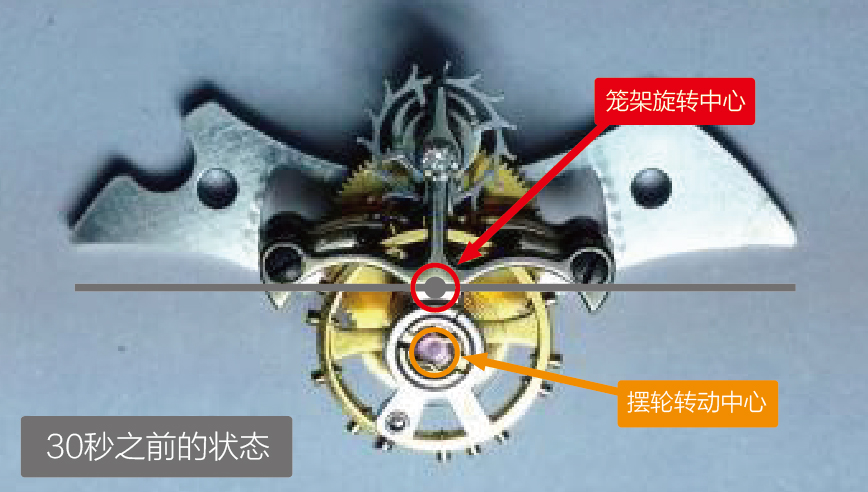
PS. 其中擒纵调速器中最重要的部分就是摆轮,也就是我们在背透手表上经常能够见到的那个黄色的一圈一圈旋动的小轮子,摆轮在游丝的弹性作用下左右不断规律地旋动,反过来是擒纵叉保持精准又规律的运动,来保持手表指示时间的准确。但由于摆轮受重力的影响就会导致手表走时产生误差,陀飞轮的诞生就是为了减缓这一现象。 下面进入正题,讲擒纵调速器的“特别版”陀飞轮。陀飞轮主要分成两大类(陀飞轮还有个亲戚卡罗素,在此文中不讲,以后有机会再议),他们分别是同轴式陀飞轮和偏心式陀飞轮。 同轴陀飞轮的特点是,摆轮的转动中心和陀飞轮笼架的转动中心为同一轴心,因此被称为同轴陀飞轮。 偏心陀飞轮的特点是,摆轮的转动中心与陀飞轮笼架的转动中心不一致,因此被称为偏心陀飞轮。同轴陀飞轮则摆轮和笼架的旋转中心是一致。

 通过图(1)图(2)我们可以明白两种陀飞轮在结构上的差异,那么它们的优缺点以及特性呢? 1.同轴陀飞轮的结构
当手表在运行时陀飞轮的笼架在旋转,此时A点以及整个笼架围绕着P点旋转,这种陀飞轮缺点问题显而易见。当A点上坡时阻力增大,手表的走时会变慢;当A点处于下坡时阻力减小,手表走时则会变快。(A点:“重力点”) 2.偏心陀飞轮的结构优点
当手表在运行走时中陀飞轮的笼架在旋转,此时A、B、C、D及整个笼架围绕着P点旋转,此种陀飞轮的优点是制造难度相对较低,四个主要的“重力点”分别布点布置的比较均匀,运转起来相对于同轴陀飞轮来说比较平稳。 接下来讲讲陀飞轮的原理,以及同轴陀飞轮、偏心陀飞轮它们各自的特性。 先来讲同轴陀飞轮,陀飞轮开始运转时,整个笼架开始顺时针转动(陀飞轮笼架是装在秒轴上的,可以这么说,陀飞轮就是“秒轮”)。 看出什么了吗?觉得我只是把图片上下颠倒了一下,没错我就是这么干的(这也正是陀飞轮的工作原理)。因为表的位差主要来源于摆轮的不平衡以及工作时的偏心,这两个原因分别在其方位相差180度,对走时快慢的影响正好相反,于是把擒纵机构和摆轮游丝系统一同配置在一个旋转的支架上,这个支架就装在秒轴上,以每分钟一圈的转速转动。因此,摆轮和游丝的重力方位每经历30秒即发生180度转换,这样两者由于偏心引起的走时快慢正好互相补偿。 这种同轴陀飞轮的优点在于:在转动时上下颠倒互相补偿摆轮和笼架旋转中心一致,因此相较于偏心陀飞轮在相互补偿时候更加均衡(缺点上面讲过了,爬坡下坡的问题)。 接下来讲偏心陀飞轮,陀飞轮开始运转时,整个笼架开始顺时针转动的情况。
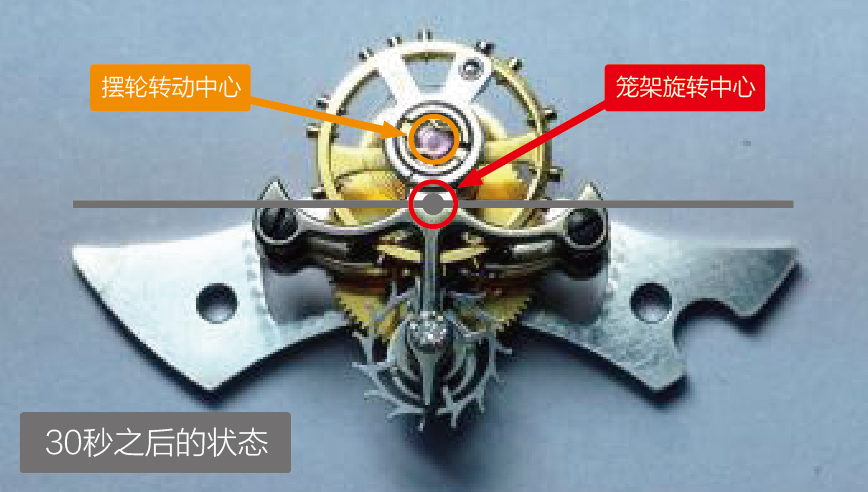 同样也只是“图片上下颠倒了”。还是那段话:因为表的位差主要来源于摆轮的不平衡以及工作时的偏心。由于这两个影响因素分别在其方位相差180度对走时快慢的影响正好相反,于是把擒纵机构和摆轮游丝系统一同配置在一个旋转的支架上,这个支架就装在秒轴上,以每分钟一圈的转速转动。因此,摆轮和游丝的重力方位每经历30秒即发生180度转换,这样两者由于偏心引起的走时快慢正好互相补偿。 这种同轴陀飞轮的缺点在于:摆轮的旋转中心与陀飞轮笼子的旋转中心不是同一轴心(这也是它被称为偏心陀飞轮的原因),因为摆轮和笼架二者并非同一轴心导致手表运转时陀飞轮开始转动,摆轮上下颠倒的不太一致导致互相补偿并不均匀(优点上面也讲过了,运行平稳)。 在这里对陀飞轮做个总结,陀飞轮是什么?陀飞轮就是一个沉重的“秒轮”。我们都知道钟表主传动线做的是增速传动,增速传动的特点就是速度越快动力越小(减速传动则相反)。秒轮几乎装在整个传动系动力的末端。而这个沉重的“秒轮”会为手表带来什么……为了给这个“秒轮减肥”所采取最简单有效的方法就是尽可能地把擒纵调速器内的零件缩小。在1795年,把如此多的零件做的那么小,并且保持高精度是非常非常困难的,那时陀飞轮是顶尖的技术,那么如今呢?200多年过去了,So Easy,把零件做小并没有什么难度,但零件小了就好么?不一定,依我看只是视觉好看罢了。在金属材质不改变的情况下故障率却是直线飙升的,可能有人不服会说某某品牌的陀飞轮故障低,因为什么呢?因为那变态的售价让制造可以不计任何成本,再者以现今的技术弄个钛金属在强度上肯定完爆普通镍白铜等普通主流金属材质。
 好了,原理讲完了,文章也接近尾声了。如果您认真看完了我上面所讲的东西,有没有发现一个严重的问题。“你”说的这个陀飞轮相互补偿的东西(指游丝和摆轮的重力方位)最理想状态下应该是建立在摆轮呈90度直立运转时才存在真正的30秒重力方位转换一次(表直立90度一动不动才存在30秒重力方位转换一次,是相互抵消的),而陀飞轮是装在手表上的,手表是佩戴在手腕上,人的手不可能一动不动一直让那个摆轮呈90度吧。没错,的确如此,我也“想不明白”厂商为啥那么喜欢把陀飞轮装在手表上,还宣传这东西对走时准确有多大多大影响。 陀飞轮诞生于1795年,那时主要搭载在怀表上,怀表的使用环境大部分时间是平直揣在胸前口袋中的,这种使用环境下摆轮的工作状态更接近90度。如果您都看到这了,那我可真是太荣幸了。最后的最后,再分享一下我的见解,对于机械手表有什么办法可以让它走得更准,我觉得可以从动力源头着手(上篇文章最开始介绍过),手表是采用S形发条的,就是为了获得更稳当的动力输出。但这还不够,必须另辟蹊径,我有个天马行空的想法,或许能够解决这个问题,在这就不说了。希望有朝一日我能够成为一名出色的制表师,把这个天马行空的想象变为现实。 陀飞轮与卡罗素最本质的区别是卡罗素的三轮齿轴与框架相咬合,而陀飞轮的框架上根本没有齿也自然也不存在咬不咬合了。 这也就是我们能看的卡罗素旋转的龙架上有一圈齿,陀飞轮则没有(上图中卡罗素结构图为偏心式,以前卡罗素大多都是偏心的极少有同轴的)一般的卡罗素都比陀飞轮的转速要慢上许多自然也做不到30秒重力方位发生一次转换互相抵消。不过近些年已经有品牌推出“一分钟卡罗素”了 世界发展看中国,中国发展看北京。生活在北京这座日新月异的超级大城市里,真是我们这代年轻人的福气。毫无疑问,我们80后90后这代人,见证了中国的发展由工业化向智能化进步的关键节点,可以说是历史的见证者,也是历史的创造者和实践者。现在,我们正以自己的青春和智慧建设着这座神奇的城市,同时也在享受着北京智能化、科技化带给我们的便利。 记得小时候,生活在北京胡同的我,家里唯一的电子设备可能就是那种老式的彩电了,当时连遥控器都没有,还是那种人工的按键,甚至还有那种旋转手柄调换频道,这种机械按钮非常容易坏,如果坏了之后想再看这个频道就非常困难,必须用各种巧劲,每次费九牛二虎之力才能打开。这些可能对于现在的小孩子都是难以想象的。慢慢长大了,上了初中,才在人生中第一次见到了电脑,是那种老式的台式机。当时我们这些小孩子都是怀着朝圣的心情去使用这些电脑的。学校里所有的电脑都被统一安放在干净整洁的机房里,进入机房必须戴鞋套,而且只有每个班的优秀生才有机会接触电脑。这些电脑还是用的dos系统,每一步都要输入指令。我们小心翼翼地操作每一个步骤,生怕把这些娇贵的宝贝弄坏了。后来,慢慢地上了大学,BP机成了标配,这种小玩意还初步具有了短信的功能。后来,手机普及了,但功能也仅限于打电话和发短信。而当我读研究生的时候,特别2010年左右,我感觉是智能化发展最快的阶段了。智能手机开始出现,然后平板电脑,然后是智能电脑和智能家居如雨后春笋般在人们的生活中落地生根。我们有幸见证了科技和人工智能的爆炸式发展,新一代信息技术、集成电路、医药健康、智能装备、节能环保、新能源智能汽车、新材料、人工智能这些领域的成果层出不穷,令人目不暇接。 生活在北京的我们自然在第一时间享受了生活科技化、智能化的便利。清晨,智能灯泡已经主动由夜间模式调整为清晨模式,发出柔和的光亮,智能空气净化器和新风系统开始检测屋内空气质量,自主判断是否需要进行空气净化和更新,而扫地机器人已经开始了工作,还自己找电源充电。上班路上,打开手机地铁APP,就可以使用二维码扫码乘坐地铁,在地铁上用APP点的早点已经送到了办公室楼下的早餐自提柜。而我上班的时候仍然可以在办公室通过智能手机看到家里的一切情况,甚至可以看到鱼缸的水温,然后操控是否需要进行加热。这在几年前仿佛是科幻电影里的场景现在就真实地发生在我的身边。北京的智能化科技化的进展真是令人叹为观止。 北京并不满足现有的成就,在创新发展方面,北京还出台了《北京市加快科技创新培育人工智能产业的指导意见》提出,推动第五代移动通信(5G)系统、工业互联网、车联网、超级计算等智能化信息基础设施建设。北京从政策、资金、人才等方面提出保障措施。现在,已经有越来越多的世界高科技企业将研发中心设在了中国,设在了北京,北京正在成为具有全球影响力的科技创新中心和智能制造中心。记得前两天看新闻,记者采访一位刚从德国回来准备到北京工作的人工智能领域的博士。他说,中关村和硅谷的差距已经缩小,在AI、大数据应用方面已经不亚于美国,在政府、风投资金和创业者强力推动下,未来的发展前景不可估量,所以他选择了到北京工作。
智能北京、科技北京的核心是以人为本,以发展为基,让我们的生活更便利、更美好,也让我们的梦想更加贴近现实,这就是我对首都美好生活的向往。 |













 万奢网手机版
万奢网手机版




